

Concurs : Robot Linie
Acest articol este publicat in cadrul concursului Robofun 2012. Perioada de votare pentru acest proiect s-a incheiat. Acest proiect a acumulat un numar de 1092 de voturi.
Acest proiect este proiectul castigator al lunii aprilie.
Ma numesc Botez Şerban, elev in clasa a VII, pasionat de robotei, in special urmaritori de linie.
In urma cu 2 ani am realizat primul robotel urmăritor, analogic, format din tranzistor, leduri IR si fototranzistori, (2 senzori) precum si mecanica din motoare de dvd +uri. Am construit senzorii, partea electrica si mecanica. Robotelul funcţiona, dar mi-am dat seama de multe probleme ce apareau datorita luminii, calităţii fototranzistorului, fiind sensibil la diferite medii de iluminare si nu eram mulţumit de viteza, etc.
Au urmat circuite operaţionale si senzori cumpăraţi. dar care nu au inbunatatit cu mult performantele.
Aşa ca am trecut la mecanica mai performanta si microcontroler. Pentru aceasta a trebuit sa studiez mult, sa fac programe. Daca la început am reuşit sa programez pentru 2 senzori folosind banale IF uri, a urmat pentru 3, 4, dar pentru a creste stabilitatea si viteza a trebuit sa măresc numărul de senzori si procedeul clasic nu ar mai fi făcut fata. Aşa ca am studiat funcţia PID, folosita de obicei la robotii de linie performanţi.
Proporţionala, Integrala si Derivata (PID) împreuna cu constantele ce trebuie introduse coordonează mişcarea robotului in funcţie de nr de senzori, de traseu, de deviaţia acestuia. Dar are si un dezavantaj la curbele ff strânse sau 90 grade. Acestea le-am tratat in algorim separat.
Nu a fost suficient doar sa scriu algoritmul, ci si foarte multe teste pentru a face un raport corect intre viteza, dimensiunile robotului, traseu, aderenta etc. Am modificat dimensiunile intre roti, lungime, pentru a folosi constantele funcţiei cat mai mici. Am construit mai multe variante a robotului.
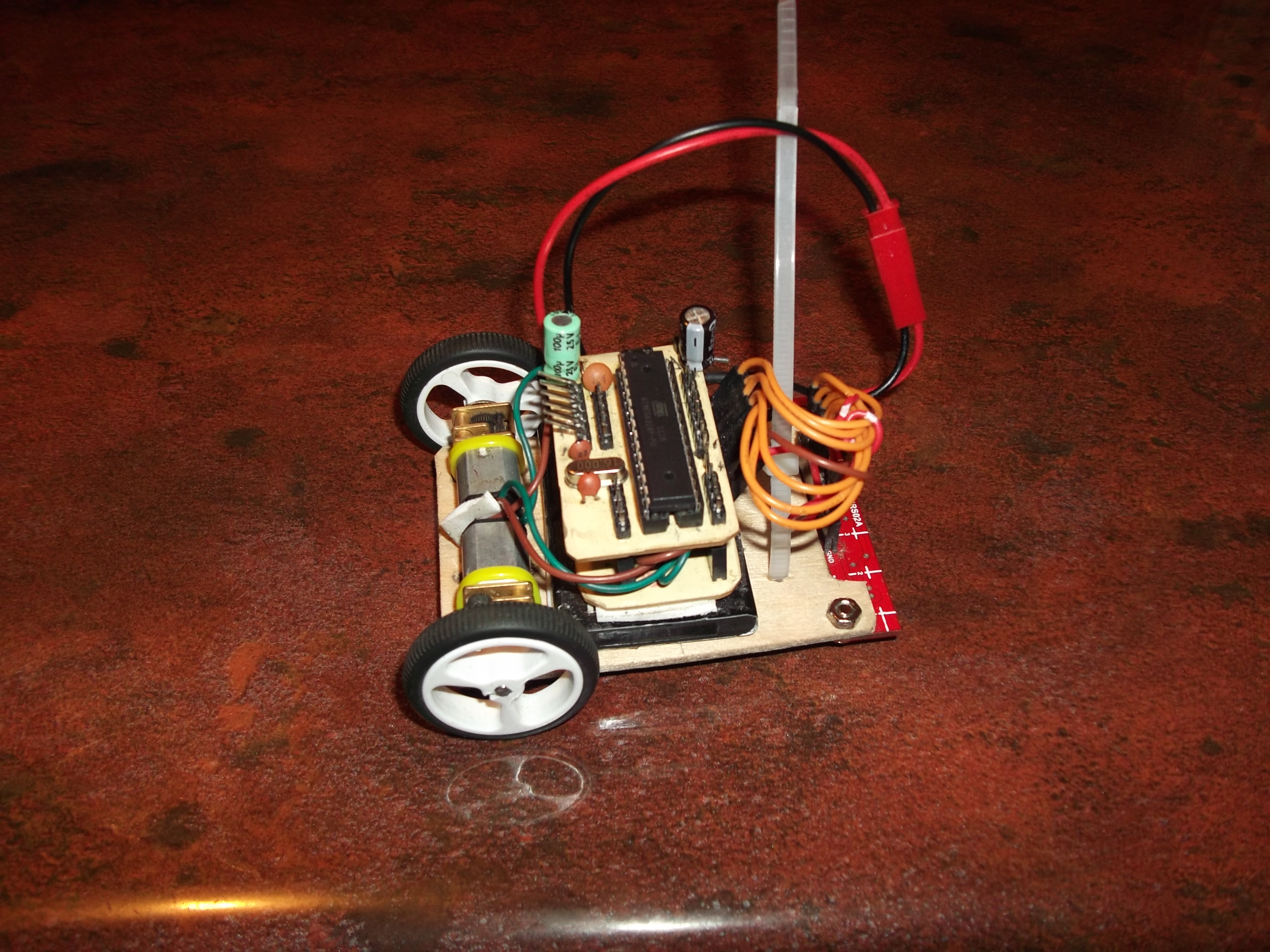
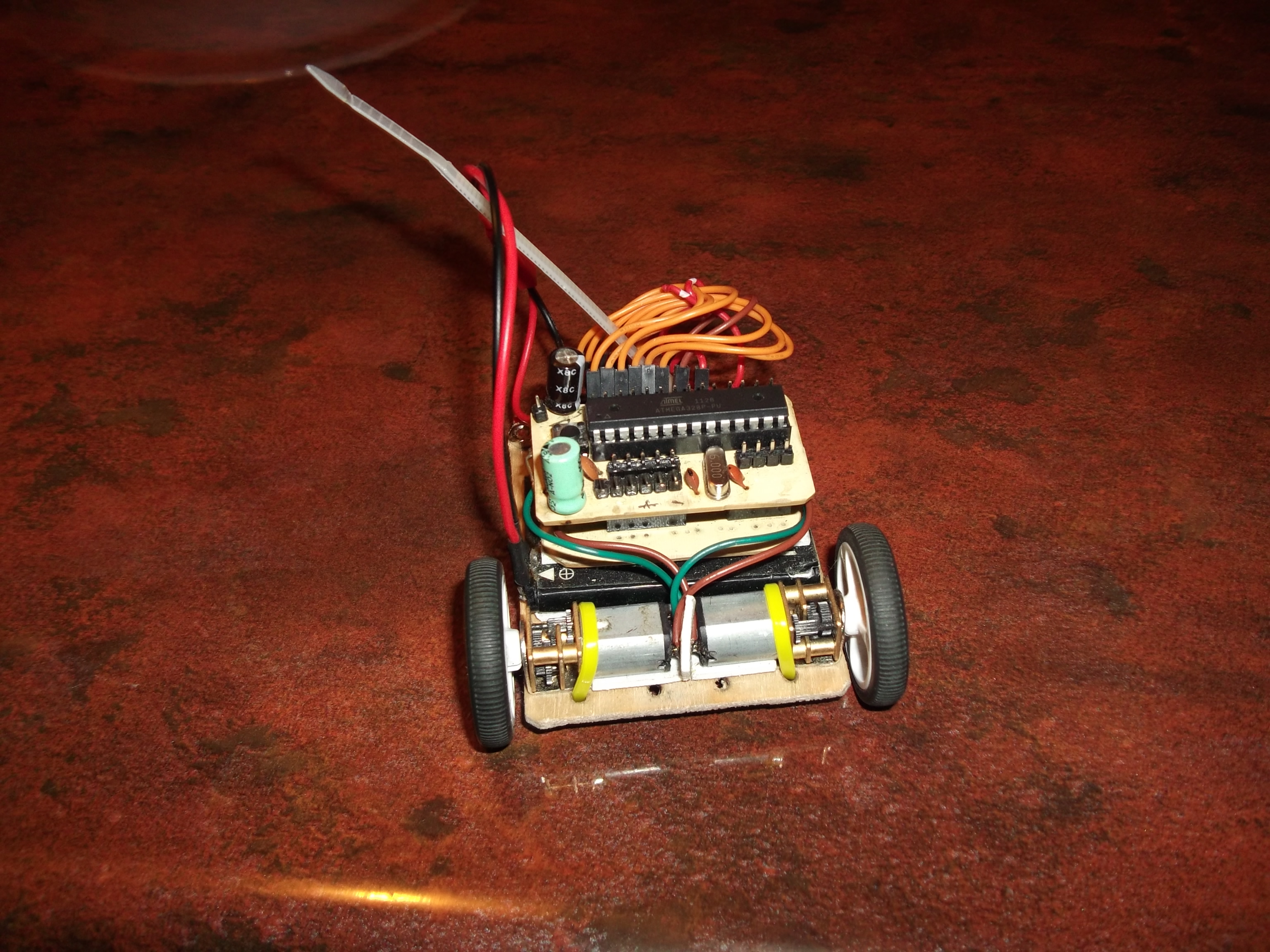
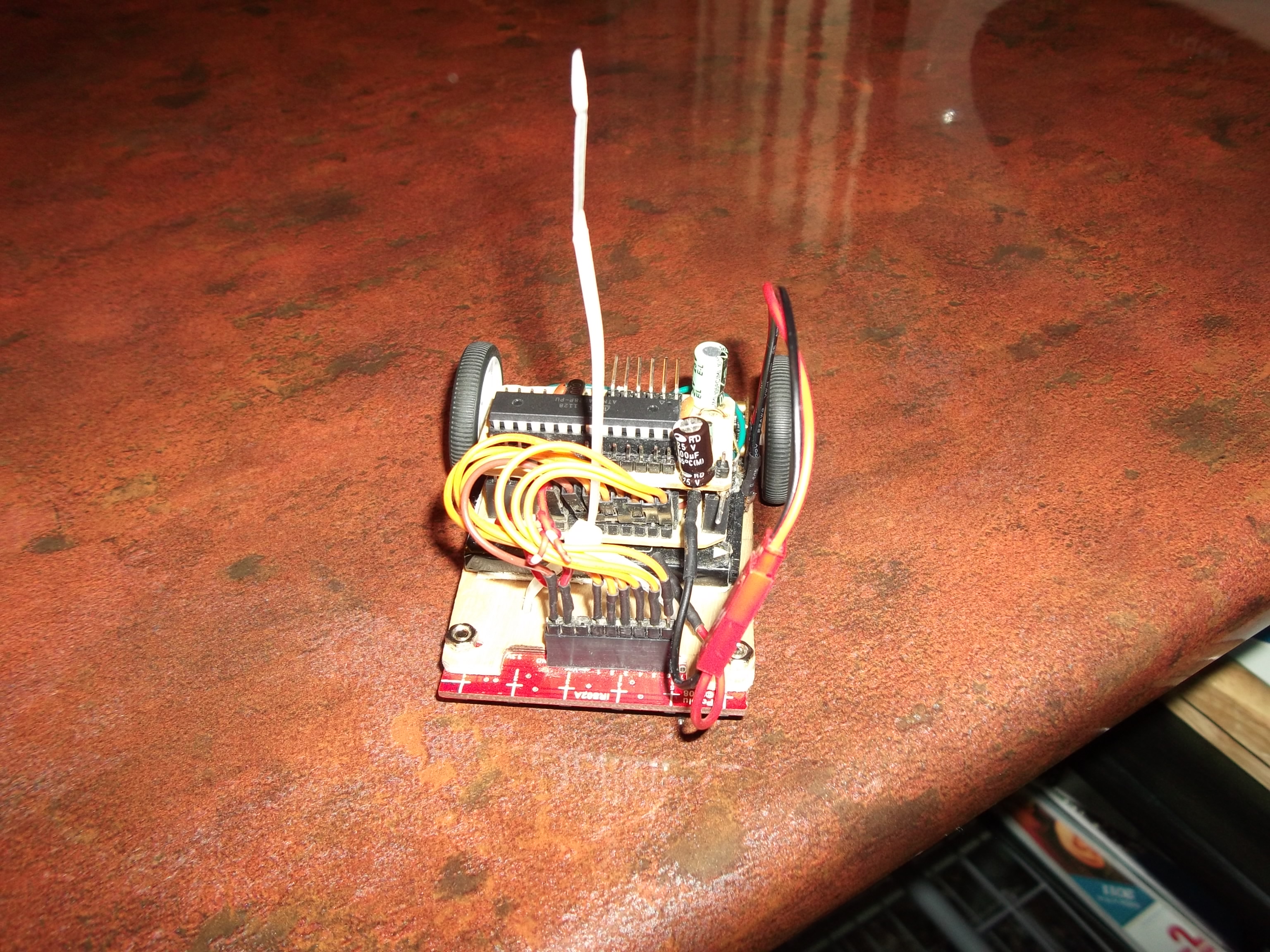
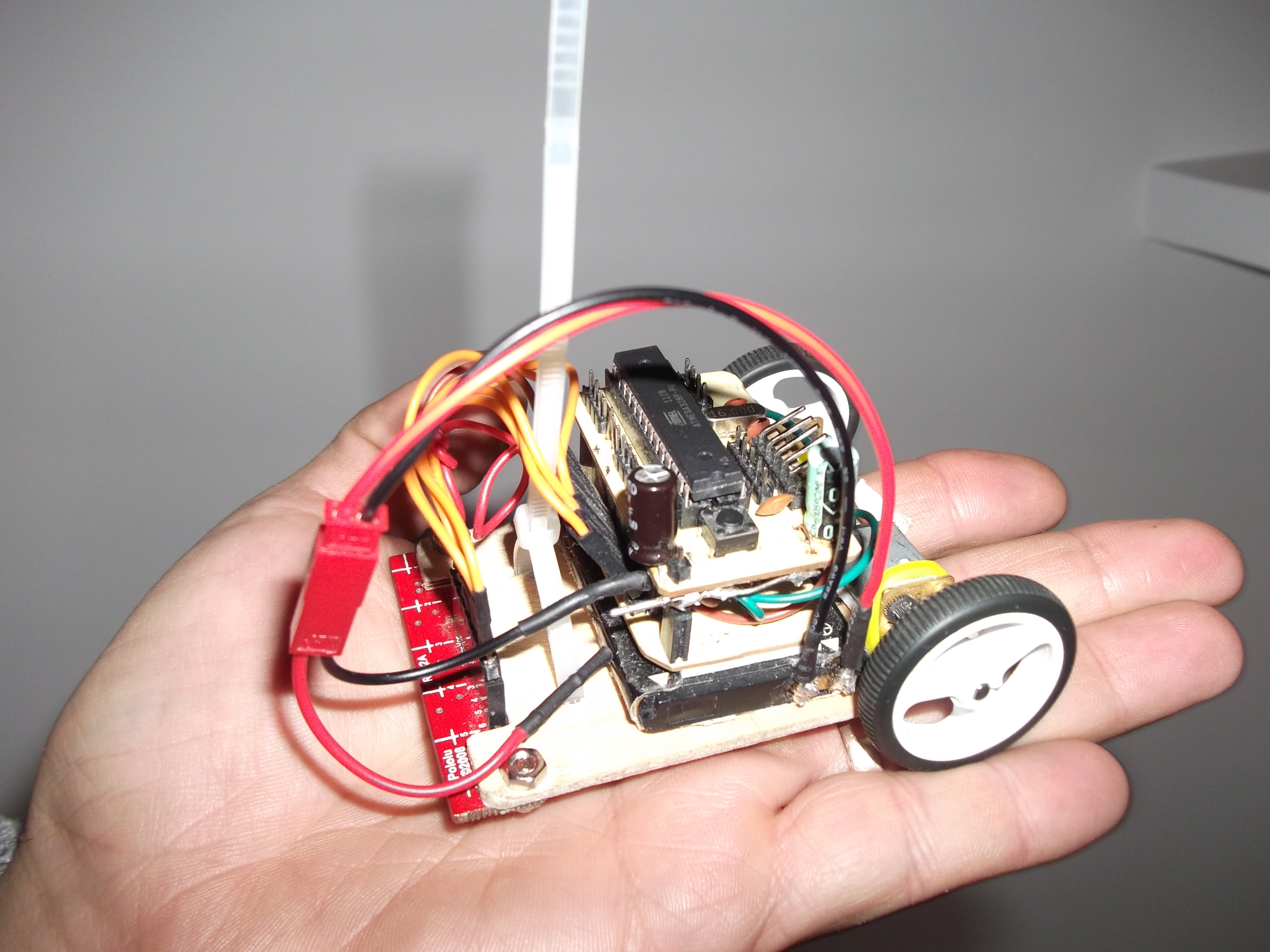
Deocamdată, in imaginile prezentate, am folosit un atmega 88, motor 50:1, roti si un driver lm293D, precum si o linie de 6 senzori. . Am construit diferite sasiuri.)cum se observa din imagini, mai mari, mai mici pentru o coordonare cat mai buna intre senzori si motoare Am optat deocamdata pentru o distanta foarte mica intre motoare, si puţin mai lung
Pe viitor doresc sa măresc nr. de senzori, mărimea robotului precum si raportul motoarelor, care cu siguranţa îmi vor da mai multe probleme de stabilitate dar sper sa măresc viteza.
Imi doresc din tot sufletul sa castig acest concurs,pentru a termina proiectul inceput.
Acest articol este publicat in cadrul concursului Robofun 2012.Perioada de votare pentru acest proiect s-a incheiat. Acest proiect a acumulat un numar de 1092 de voturi.
Acest proiect este proiectul castigator al lunii aprilie.
Curs Gratuit Arduino

Comandă piese de robotică & electronică originale

