

Concurs : SixBot
Acest articol este publicat in cadrul concursului Robofun 2012. Perioada de votare pentru acest proiect s-a incheiat. Acest proiect a acumulat un numar de 37 de voturi.
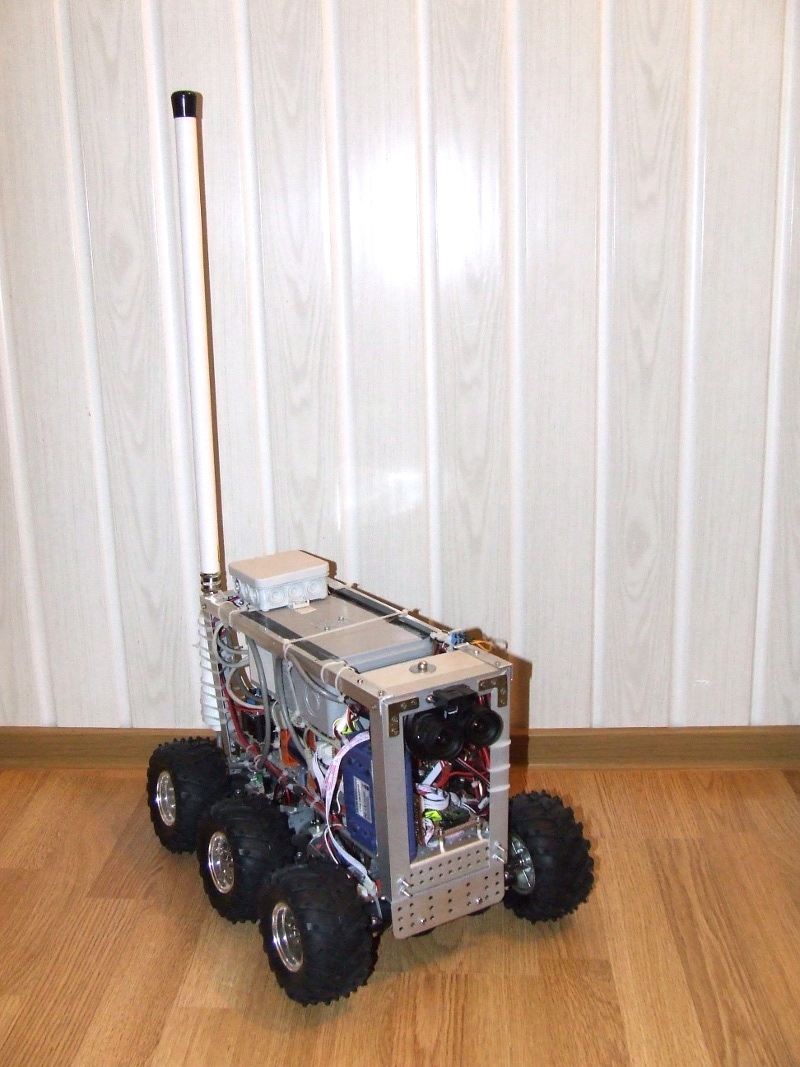
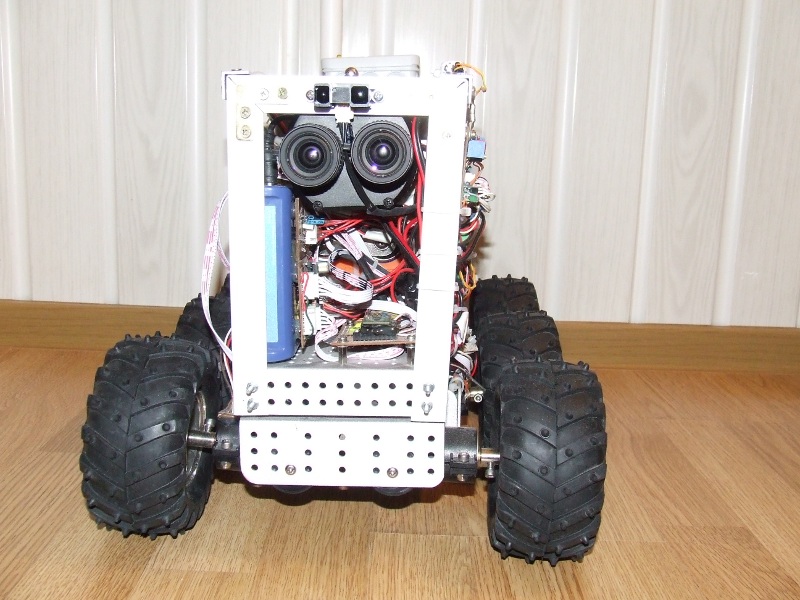
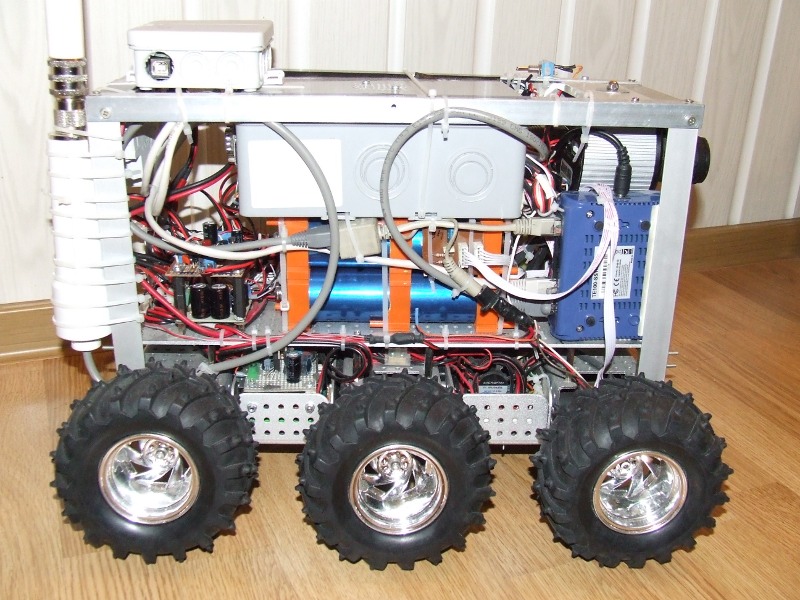
This project is in the building phase for over an year because it is in a permanent change and it`s inspired from military models. Mechanically speaking it`s not the ideal model because it is taller, heavier and it cannot climb big angle hills because the position of the batteries is the main problem. I have used hobby components, Chinese connectors and other electrical parts, 30 years old used Sony and military russian components. The video camera is a dual Arecont CCD day/night, 3MPix/1.3MPix made in USA. Unfortunately it send over MJPEG compression and it uses 5-6 Mbps at 1fps/3Mpix. I have spent a few months to build and optimize the DC/DC convertors. Other 2 projects showed me that the DC/DC convertors have a crucial role in the power usage.
http://www.youtube.com/watch?v=Mjb8qElt5P8&feature=player_embedded
For the moment the robot only collects data and makes no processing. In the future we will change the platform to Linux because it is made on WinXP and we will implement an automatic navigation function, but the maths are killing us. I have used a chassis with 1/75 gears, but the quality of the execution is not very good, anyway it is suitable for our purpose.The GVWR has approximately 6kg, only the LIFePo 4pcs x 3.2Vx 12Ah have 1.3kg. Initially i used the controller and the mos-fet drivers of this chassis but at 4KHZ it was on fire. After some tests i have purchased some 15A drivers from Spakfun, 30A sensors and an Arduino Uno on which i have implemented Correct-Phase PWM. It is working perfectly, no overheating. The communication between the logical blocks it`s done on I2C. The hardest work was done by my son, Vlad, who is a student in the last year of high-school. The software is done on WinXP programmed in C# and the Arduino IDE. The robot is controlled by a webpage, it is working on every device which has on it JavaScript. On the robot an web-server is working and another software which handles the socket connections between the client and the main computer. My son spent some good hundred hours to get the software up and running. It was very hard to correct the errors. Expect some minor bugs which will be solved very soon everything is working flawlessly. Today we have tested it in the filed and we are pleased by the results.


Curs Gratuit Arduino

Comandă piese de robotică & electronică originale

