

Concurs : Robot all terrain controlat prin Bluetooth
Acest articol este publicat in cadrul concursului Robofun 2012. Perioada de votare pentru acest proiect s-a incheiat. Acest proiect a acumulat un numar de 80 de voturi.
Proiectul de fata prezinta implementarea unei idei de a realiza un robot controlat prin Bluetooth care sa se poata deplasa pe teren accidentat. Controlul se poate realiza prin intermediul unui telefon mobil echipat cu Bluetooth sau a unui PC (laptop sau desktop).

Componente folosite
- Platforma de dezvoltare folosita: un modul FEZ Domino programat in limbajul C#.
- Sursa de alimentare: Baterie Li-Po 3s 11.1V 2200 mA
- Sistem deplasare: 4 servomotoare standard modificate pentru rotatie continua conectate la roti de automodel pentru off-road.
- Sistem comunicare: modul Bluetooth Modem – BlueSMiRF Silver.
- Sasiu: 4x Universal Plate 60 x 160 mm si set de constructie metalica cu piese de diverse forme.
- Senzor distanta: Sharp GP2Y0A21YK.
Descrierea partii electronice
Placa de baza formata dintr-un modul FEZ Domino este conectata prin intermediul portului serial la modului Bluetooth care este folosit pentru comunicare bidirectionala cu operatorul uman. Pentru comanda servomotoarelor s-au folosit porturile PWM prezente pe placa de baza.
Alimentarea estea realizata separat pentru placa de baza si pentru servomotoare. Pentru placa de baza este legata direct bateria de 11.1V si este folosit regulatorul de tensiune prezent pe placa pentru a adapta aceasta tensiune de alimentare la tensiunea necesara placii. Alimentarea servomotoarelor (acestea necesitand un curent mai mare decat poate fi livrat de FEZ) sunt alimentate de un regulator de tensiune LM323 care poate da tensiunea de 5V la 3A, curent suficient pentru alimentarea a toate cele 4 servomotoare. Daca s-ar fi optat pentru alimentarea placii FEZ prin regulatorul care alimenteaza servomecanismele, placa de baza ar suferi restarturi din cauza fluctuatiei tensiunii de alimentare cauzata de consumul servomotoarelor. In aceasta configuratie bateria nu este deloc fortata ea fiind capabila de a furniza curent pana la 20C (de 20 de ori capacitatea ei: 20 * 2200 mA = 44A).
Pentru protectia la supra descarcare a bateriei s-a folosit un divizor de tensiune pentru a adapta proportional tensiunea bateriei la nivelul acceptat la portul de intrare analogica a placii de baza. Cand o tensiune sub 3V per celula (9V tensiune furnizata de baterie) este detectata, functionarea robotului este oprita si operatorul este anuntat despre acest lucru.
De asemenea s-a folosit un senzor de distanta Sharp GP2Y0A21YK pentru a informa operatorul despre distanta intre robot si un eventual obstacol. Senzorul este alimentat de placa de baza si citirea tensiunii furnizata de acesta este citita printr-un port de intrare analogica al placii de baza. In cazul in care contactul vizual cu robotul este pierdut acesta este dotat cu un buzzer ce poate emite un sunet puternic pentru a ajuta operatorul la gasirea robotului. Operatorul poate configura de la distanta intensitatea sunetului emis de catre buzzer.
Descrierea partii mecanice
Pentru deplasarea robotului au fost modificate pentru rotatie continua 4 servomotoare, acestea avand un cuplu mare, fapt ce ajuta la deplasarea robotului pe teren accidentat. Pentru a transmite cuplul la sol s-au folost 4 roti de automodelism. Aceste roti sunt realizate din cauciuc aderent si de asemenea au un profil ce ajuta la cresterea aderentei pe diverse suprafete. Tot pentru a mari mobilitatea robotului pe teren accidentat s-a optat pentru realizarea unui sistem cu punti independente astfel incat puntea fata se poate misca independent de puntea spate fapt ce ajuta la pastrarea contactului cu solul a rotilor.
In cazul rasturnarii accidentale a robotului a fost construit un sistem de protectie a partii electronice si a bateriei asemanator cu cel folosit de masinile de raliuri (roll cage) care sa preia greutatea robotului astfel incat sa nu fie afectata partea electronica.
Comunicare cu operatorul
- Odata realizata conexiunea Bluetooth cu robotul operatorul uman poate controla urmatoarele :
- Directia de deplasare a robotului (inainte, inapoi, stanga, dreapta)
- Alarma sonora a robotului
- Nivelul sonor al alarmei
- Poate solicita informatii referitoare la tensiunea bateriei
- Poate solicita informatii de la senzorul de distanta
Media
Pentru a observa deplasarea robotului pe teren se poate accesa urmatorul link http://www.youtube.com/watch?v=Hz9sHhRHCCc
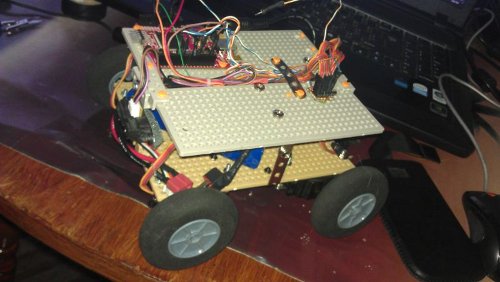
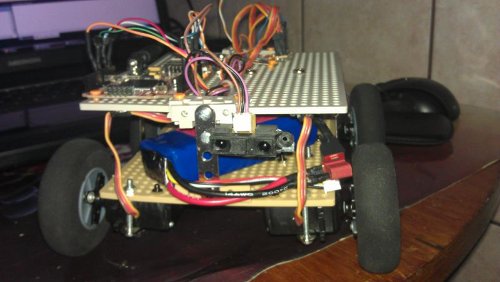
Pozele atasate reprezinta evolutia proiectului pe masura ce acesta a fost implementat.









Curs Gratuit Arduino

Comandă piese de robotică & electronică originale

