

Cum funcționează un braț robotic programabil? Tipuri de brațe robotice folosite în diverse industrii
Să recunoaștem, toți avem uneori nevoie de o mână de ajutor în plus. Dar, nu ar fi minunat dacă acea mână în plus ar fi atașată la un braț robotic care poate face lucruri imposibile pe care brațul uman nu le poate realiza? Acest lucru a devenit posibil în1959 când Joe Engelberger, recunoscut astăzi ca părintele roboticii, a creat primul robot industrial care se baza pe un braț robotic.
Avantajul principal al folosirii unui braț robotic programabil este acela că pentru a învăța algoritmul pe care îl vei folosi pentru a controla robotul nu ai nevoie de cunoștințe de programare avansate. Nu trebuie să fii un expert în ecuații diferențiale pentru a-ți face robotul să se deplaseze. În schimb, te poți baza pe codul Python pe care îl poți folosi pentru a-ți face brațul să se miște.
Indiferent dacă ești interesat să automatizezi un braț robotic sau ești interesat în general de domeniul roboticii și vrei să înțelegi mai multe detalii despre utilizarea brațelor robotizate și modul în care ele funcționează, ai ajuns în locul potrivit.
Ce este un braț robotic?
Un braț robotic este un angrenaj mecanic, de obicei programabil, cu funcții similare cu un braț uman; brațul poate fi un mecanism care poate funcționa individual sau poate face parte dintr-un robot mai complex.
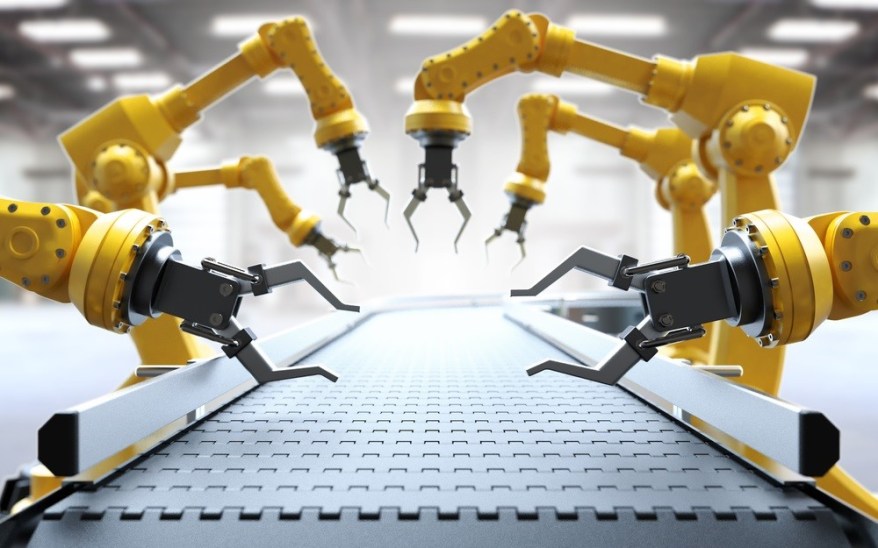
Un braț robotic este un fel de lanț cinematic deschis, un grup de legături și articulații. De obicei, la capătul acestui lanț se află un instrument specific cum ar fi un dispozitiv de prindere, de sudură sau un burghiu. Acesta este numit efectorul final. Efectorul final, sau mâna robotică, poate fi proiectat pentru a îndeplini orice sarcină dorită, cum ar fi sudura, prinderea, înfiletarea, sortarea, împachetarea, încărcarea etc, în funcție de aplicație. De exemplu, brațele robotice folosite în liniile de asamblare auto îndeplinesc o varietate de sarcini, cum ar fi sudura pieselor și plasarea lor în procesul asamblării.
Un exemplu bun de legături și articulații este propriul tău braț. Legăturile din braț sunt oasele, iar articulațiile sunt conexiunile dintre oase: cotul, umărul, încheietura mâinii etc. O legătură poate fi de orice formă și dimensiune, atât timp cât este un obiect solid, rigid. În general, îmbinările aparțin uneia dintre cele două feluri:
- Articulațiile rotative sunt articulațiile cele mai cunoscute. Ele sunt echivalente cu o balama: se rotește într-un singur sens. O balama a unei uși sau o roată este un exemplu excelent de îmbinare rotativă. Articulațiile rotative au o axă care descrie modul în care se rotește. Cotul tău este un alt bun exemplu de articulație rotativă.
- Articulațiile liniare sunt mai puțin frecvente, dar sunt utile atunci când se dorește mișcare liniară și nu de rotație. Îmbinările liniare alunecă de-a lungul unei linii, precum un glisier al sertarului sau un telescop.

Tipuri de brațe robotice
Braţele robotice, cunoscute şi sub denumirea de roboţi articulaţi, pot avea până la 10 articulaţii rotative, ceea ce le permite să efectueze mişcări complexe pentru a avea acces la obiectele prelucrate, în jurul acestora şi în interiorul lor. Braţele sunt în mod normal universale, iar la efectorul final („încheietura mâinii”) pot fi conectate o multitudine de instrumente diferite. Printre astfel de instrumente se numără dispozitive de sudură, cleşti de prindere pentru ridicarea şi deplasarea obiectelor sau chiar capete de pulverizare pentru vopsirea şi acoperirea suprafeţelor.
Cele mai cunoscute tipuri de brațe robotice sunt:
Braț robotic articulat
Un braț robotic articulat este genul de braț robotic cu care probabil ești cel mai familiarizat. Acest braț robotic poate avea de la 3 la 7 articulații rotative și sunt utilizate de obicei în aplicații precum sudura sau vopsitul, din industria auto, unde efectorul final trebuie să fie în poziții și orientări foarte specifice.

Braț robotic paralel
Acest braț robotic este un sistem mecanic care folosește mai multe lanțuri seriale controlate de computer pentru a sprijini o singură platformă sau efector final. Probabil, cel mai cunoscut manipulator paralel este format din șase actuatoare liniare care sprijină o bază mobilă pentru dispozitive precum simulatoarele de zbor. Cunoscute și sub denumirea de roboți paraleli, sau platforme Stewart (în recunoașterea inginerilor care le-au proiectat), aceste sisteme sunt brațe robotice articulate care folosesc mecanisme similare pentru mișcarea fiecărui robot sau a brațelor manipulatoare.
Braț Robotic Delta
Un robot Delta este un tip de robot paralel care constă din trei brațe conectate la îmbinările universale de la bază. Caracteristica cheie de proiectare este utilizarea paralelogramelor în brațe, care menține orientarea efectorului final, spre deosebire de platforma Stewart care poate schimba orientarea efectorului său final.
Brațele robotice Delta au o utilizare populară la ridicare și ambalare în fabrici, deoarece pot fi destul de rapide, unii executând până la 300 de selecții pe minut. Industriile care se folosesc de viteza mare a roboților Delta sunt industria ambalajelor, industria medicală și farmaceutică. Datorită preciziei sale este folosit și pentru interventii chirurgicale. Alte aplicații includ operații de asamblare de înaltă precizie pentru componente electronice, iar recent tehnologia a fost adaptată imprimantelor 3D.

Braț robotic cilindric SCARA
SCARA este un acronim pentru Selective Compliance Articulated Robot Arm (Robot cu braț articulat mobil în plan) și este conceput să facă față la o mare varietate de operații de manipulare a materialelor. În principiu, brațul robotic SCARA are o rază de acțiune de formă cilindrică cu variații la diametrul și adâncimea cilindrului. În majoritatea aplicațiilor, roboții realizează operații de asamblare sau de preluare și plasare care necesită un receptor final. Acesta poate fi un simplu graifer sau o unealtă universală montată la capătul brațului cu distribuitoare sau șurubelnițe.
Braț robotic macara
Un braț robotic macara este un braț simplu în care toate articulațiile sunt liniare. O articulație liniară mișcă sarcina în sus și în jos, o altă îmbinare liniară o deplasează spre exterior și spre interior. Aceste tipuri de brațe robotice sunt folosite pentru ridicarea și paletizarea pieselor grele, cum ar fi caroserii sau autoturisme complete.
În prezent, multe industrii diverse utilizează deja o gamă largă de brațe robotice programabile, de la domeniul medical, farmaceutic, până la cel alimentar, al agriculturii sau auto. Sunt necesare abilități supraumane pentru a repeta aceeași mișcare timp de mai multe ore cu exact aceeași precizie, însă cu ajutorul automatizării inteligente a operațiunilor repetitive diferite în funcție de fiecare domeniu, acest lucru este posibil.
Curs Gratuit Arduino

Comandă piese de robotică & electronică originale

